Overview¶
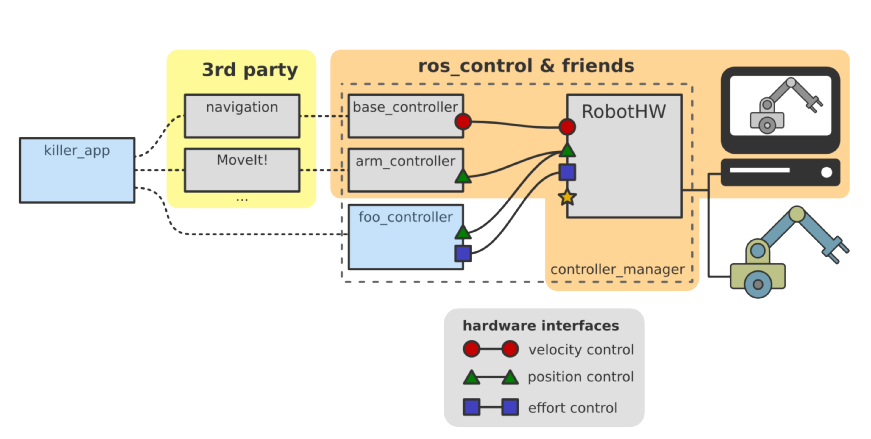
Schematic overview of the components.
The above diagram represents working of a package named “killer_app” to control a robot. In the package developed the “killer_app” is “panda_python” which interfaces with “MoveIt” to control the robot.
The following use cases considered for development :
Record the joint values in teach mode. Currently “model_example_controller” is used to collect joint values and store it to a text file. The joint values are recorded periodically.
Note
Further development will be to use “Moveit to record joint values and create a GUI to take joint values according to user input.
Allow the user to define jobs to be performed at each way-point.
Obstruction detection and new path generation.
Warning
The obstruction detection is not enabled now, the robot stops on facing obstruction.
The main packages developed/utilised are explained next.